
激光雷达 & 视觉融合
多模态感知一体化
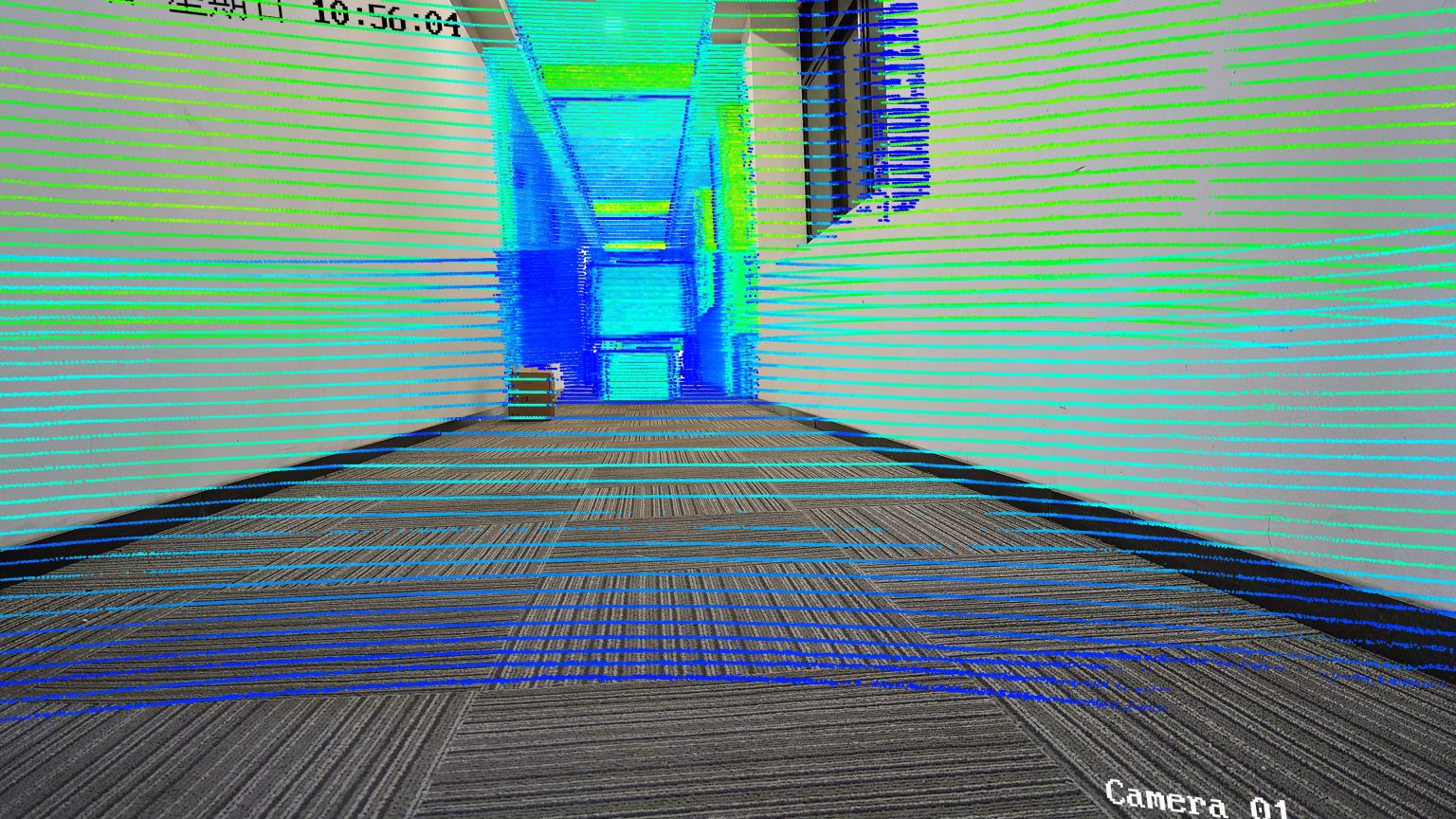
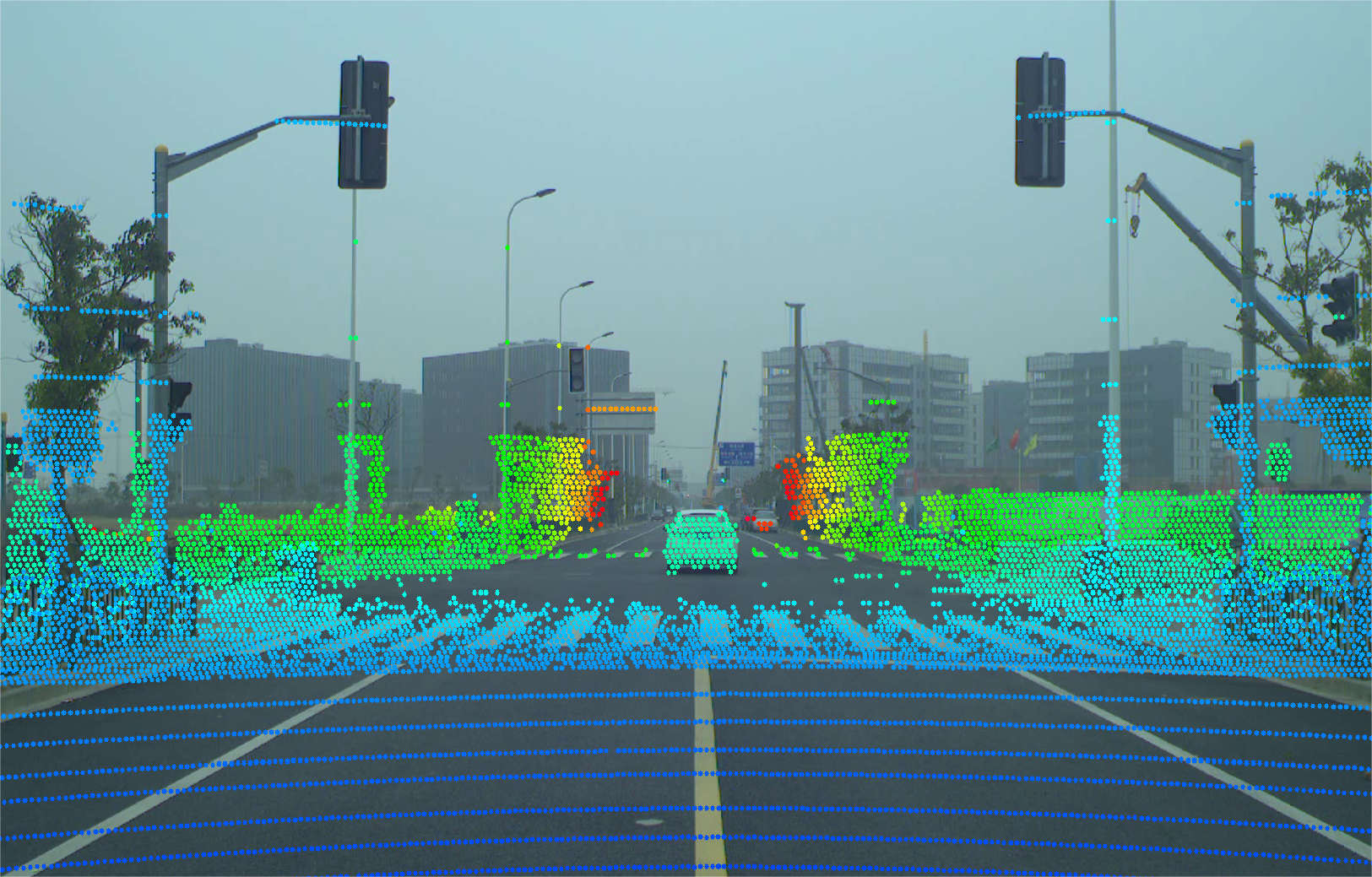
点云 + 图像,互补提升鲁棒性
时空同步标定
深度 + 纹理融合
目标检测 / 分割
开放推理接口
HOW IT WORKS
工作原理
-
传感器同步采集
统一时间基准与外参,保证点云与图像帧对齐。
-
特征级 / 决策级融合
按场景选择融合策略,兼顾时延与精度。
-
模型部署与回灌
支持边缘与服务器部署,在线回灌难例持续迭代。
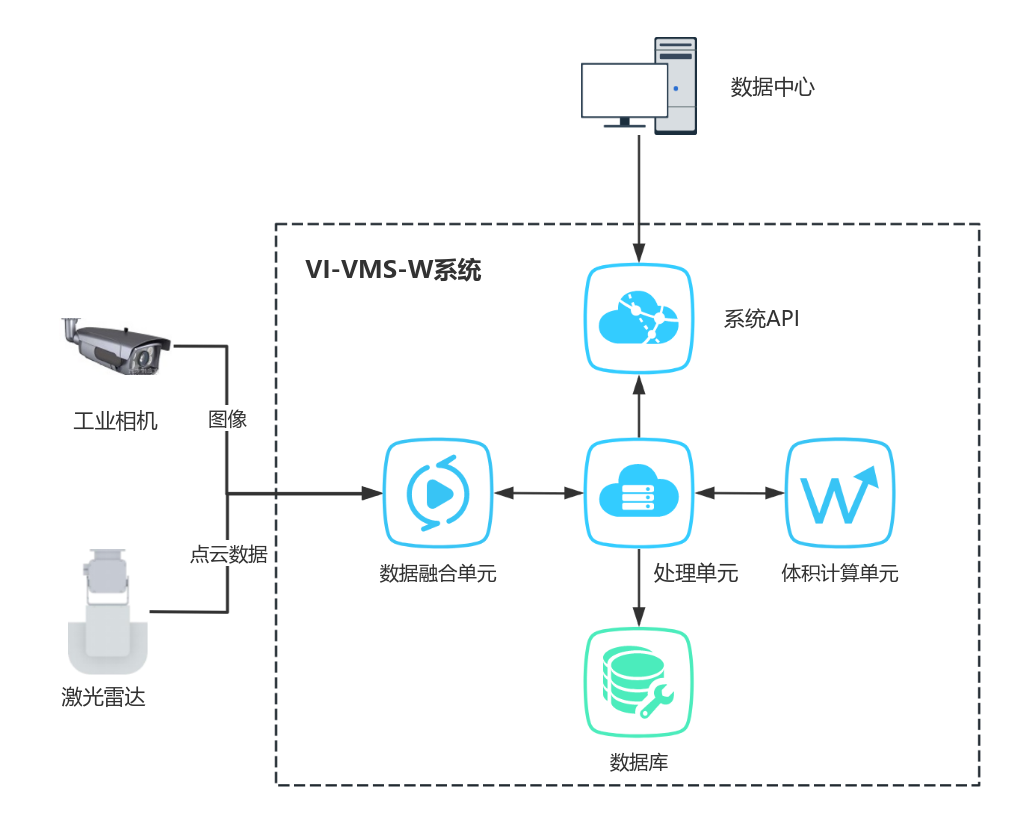
ARCHITECTURE
架构图
-
高精度测量
采用高精度激光雷达与相机融合技术,结合先进算法,确保体积测量误差小于1%,满足工业级精度需求。
-
智能识别与过滤
内置智能识别算法,可自动区分物料类型并过滤干扰物体(如人员、设备),确保仅计算目标物体的体积。
-
实时数据处理与显示
实时生成三维点云数据,并通过用户友好界面显示测量结果,支持快速决策与操作。
-
灵活适配多种场景
支持用户自定义测量区域(ROI),适配不同仓库布局与物料类型,广泛应用于物流、再生资源、农业等领域。
-
数据驱动仓储优化
测量结果支持一键导出与报告生成,帮助客户优化库存管理,提升仓储效率,降低运营成本。