
3D multimodal perception — fusion, pose estimation, and intelligent security (HEGANG YUNCHANG)
3D multimodal perception — fusion, pose, and smart perimeter (HEGANG YUNCHANG)
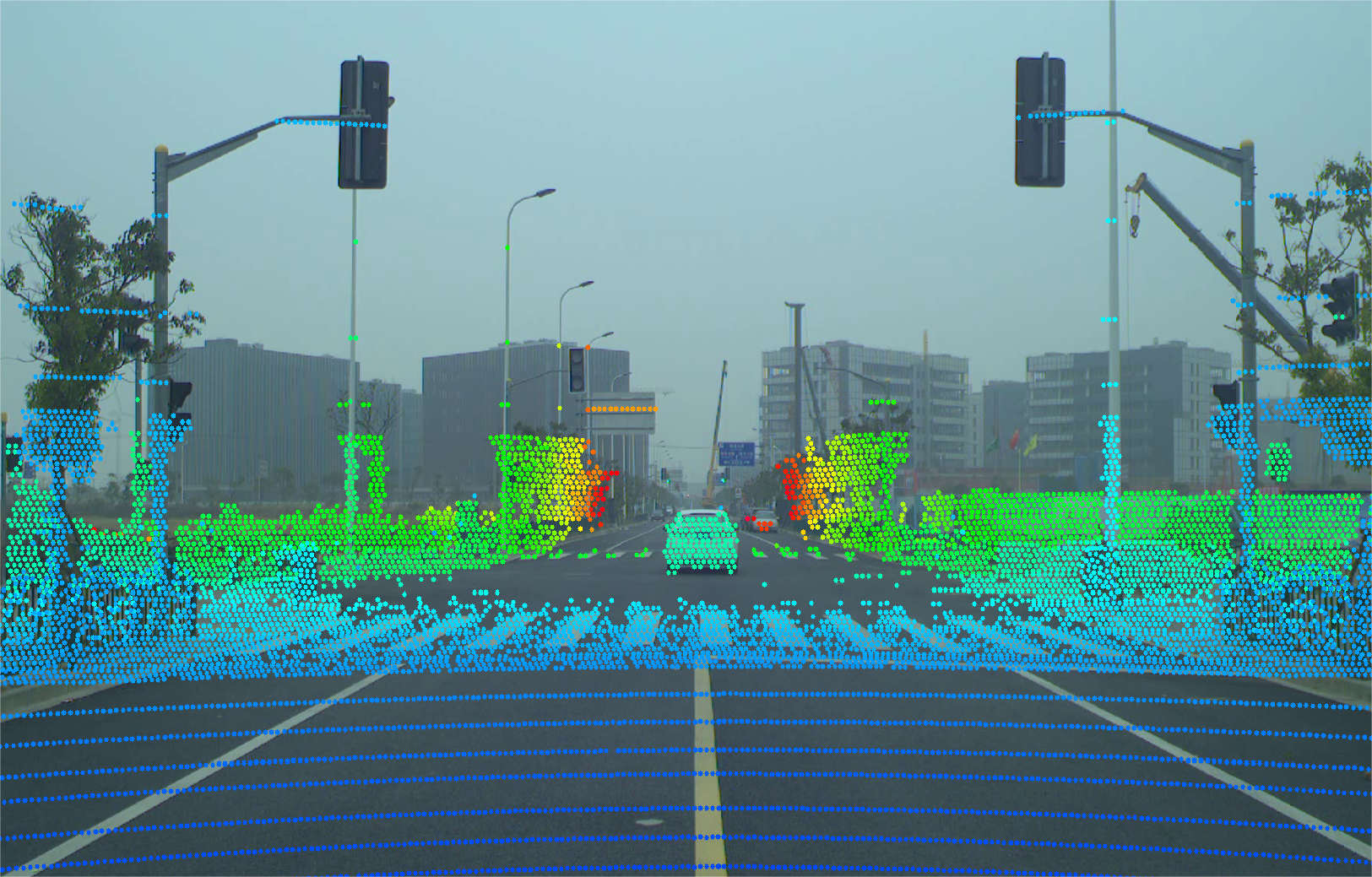
HEGANG YUNCHANG fuses LiDAR with RGB/depth for robust detection and pose under glare and partial occlusion—supporting truck verification, grasp guidance, automated loading, and 3D perimeter use cases, with PLC, crane, and business platform hooks.
Why HEGANG YUNCHANG
- 100+ projects completed
- 28 official partners
- 40+ countries
SOLUTIONS
Scenario-based solutions
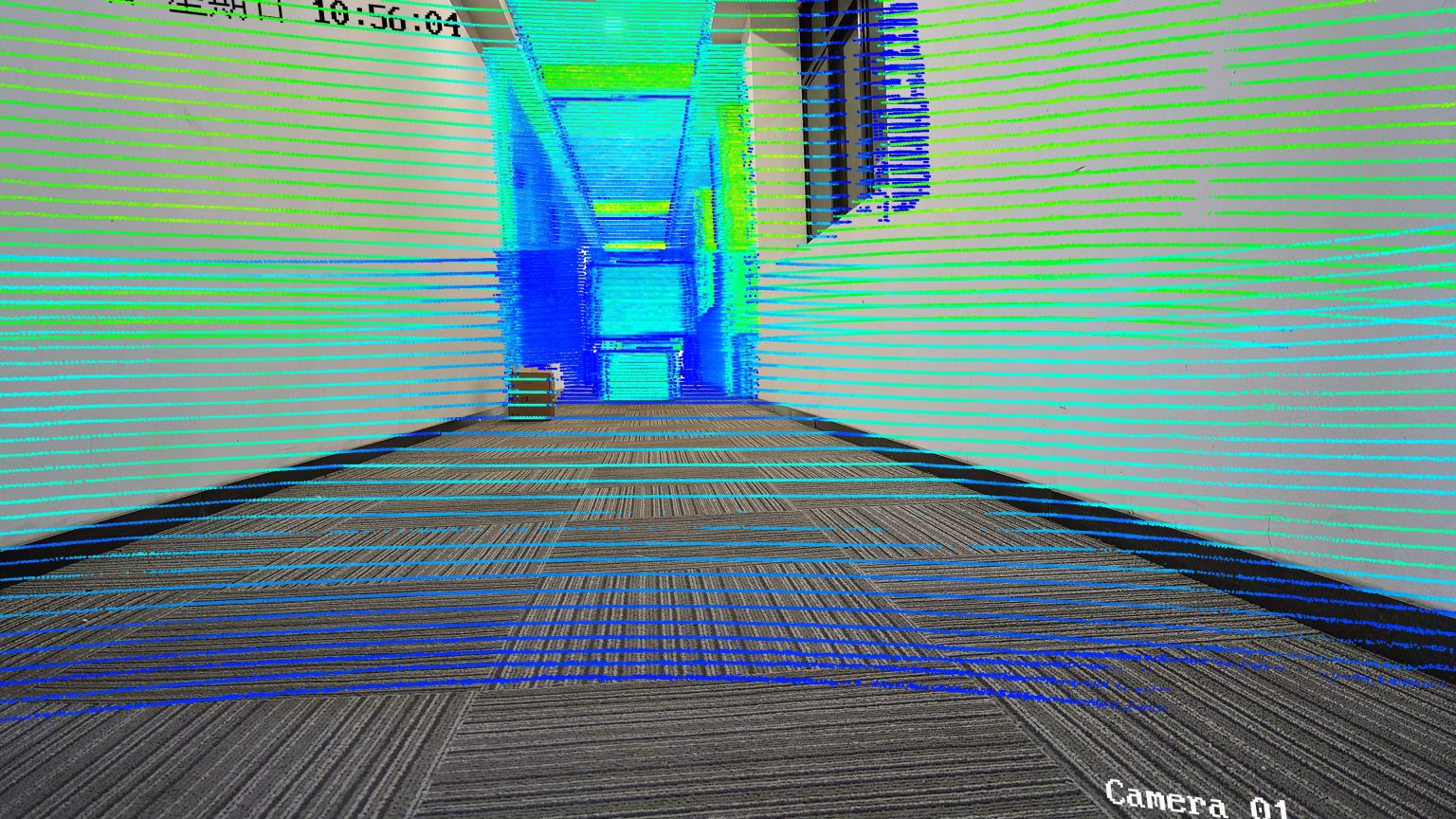
Fused perception & detection
Combine dense clouds with image cues for edges, speculars, and partial occlusion—detection, segmentation, or tracking outputs for your stack.
Learn moreTalk to an engineer
Share object classes, takt time, mounting limits, and protocols—we will size sensors and algorithms.
Contact us